Câblage et configuration
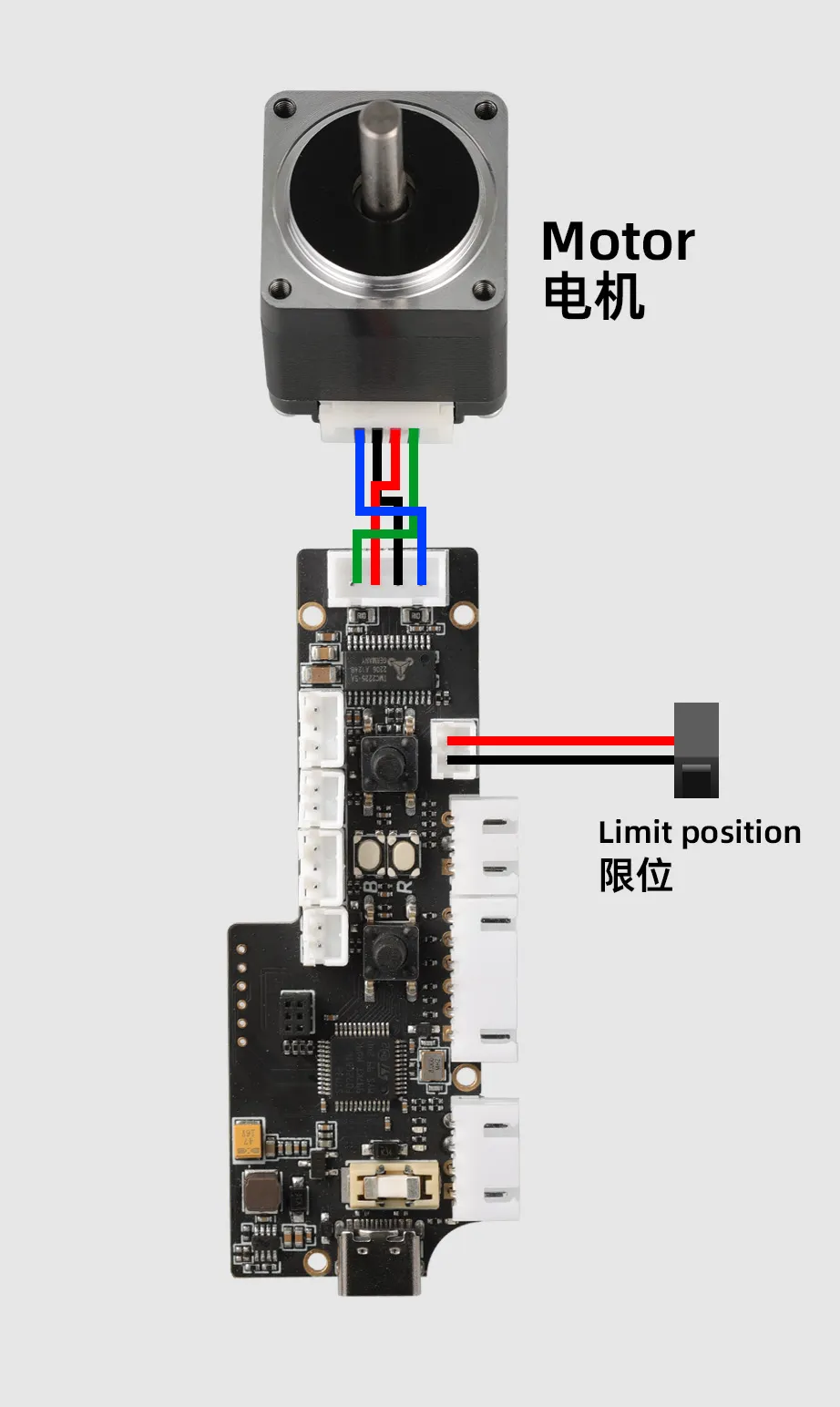
Schéma de câblage interne du buffer
Vidéo d'installation
Connexion du buffer à la carte mère et méthode de configuration
- Le
MMU tool boardmentionné dans les exemples de câblage ci-dessous est uniquement fourni à titre de référence pour la définition des interfaces. Lors de l'utilisation réelle, vous devez :
- Connecter directement les câbles aux broches de signal des fin de course de votre carte mère KLIPPER.
- Modifier et confirmer les configurations des numéros de broche dans le fichier de configuration (par exemple
printer.cfg) afin de garantir un fonctionnement correct.
- Fonction de base
- Utilisation des fonctions d'approvisionnement ou de retrait automatique du buffer
- Méthode de câblage et de configuration avec capteur MDM
-
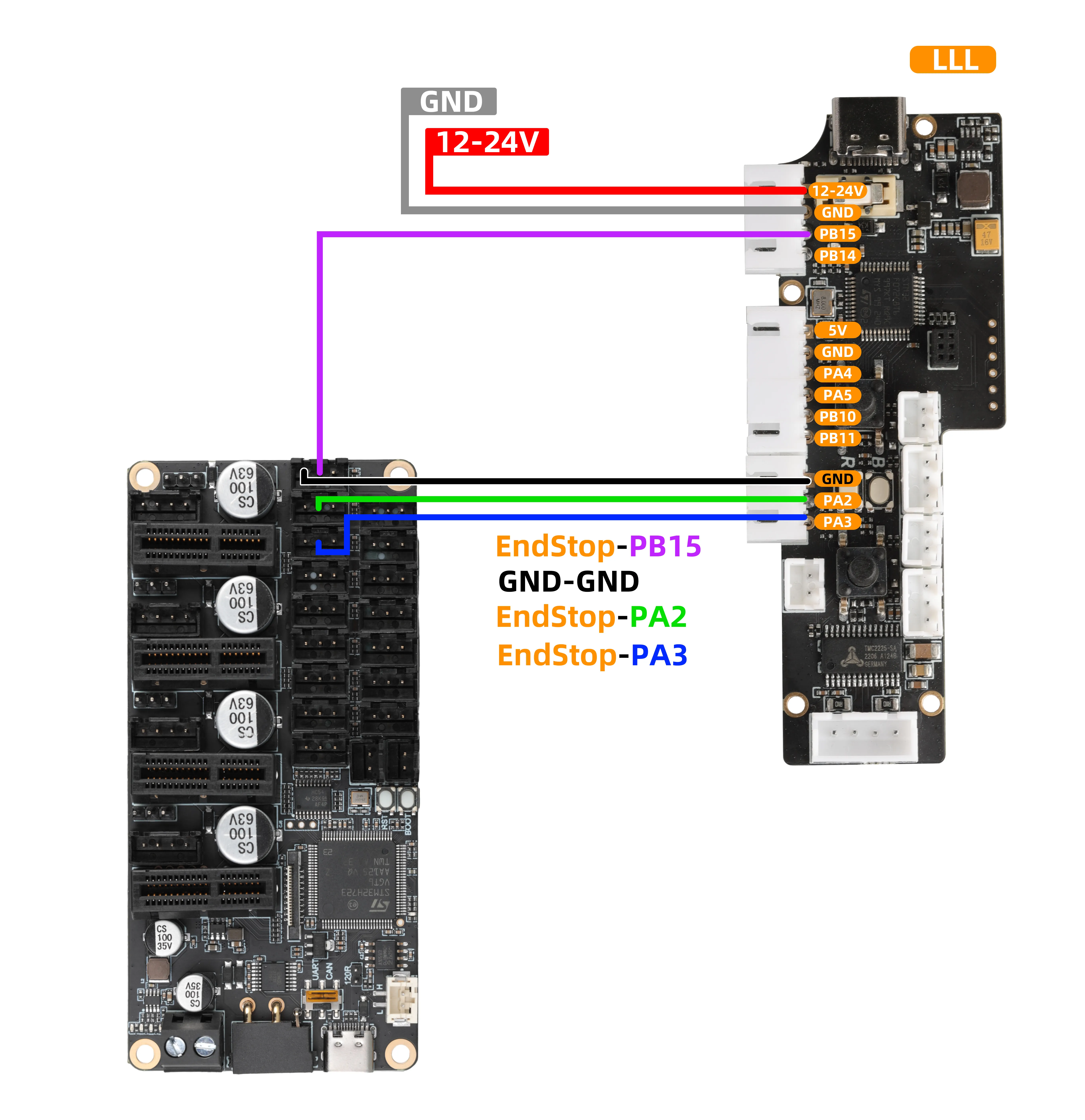
Ce buffer intègre les fonctions de détection de rupture de filament et de contrôle manuel :
-
Détection de rupture de filament (FILAMENT_SENSOR)
- Sortie du signal : Lorsqu'une rupture de filament est détectée, la broche
PB15du buffer émet un signal bas.
- Sortie du signal : Lorsqu'une rupture de filament est détectée, la broche
-
Bouton d'approvisionnement (FEED)
- Clic simple : La broche
PA2du buffer émet une impulsion haute de 3 secondes. - Appui long : Le buffer exécute une action d'approvisionnement continue jusqu'au relâchement du bouton.
- Clic simple : La broche
-
Bouton de retrait (RETRACT)
- Clic simple : La broche
PA3du buffer émet une impulsion basse de 3 secondes. - Appui long : Le buffer exécute une action de retrait continu jusqu'au relâchement du bouton.
- Clic simple : La broche
Guide de câblage
-
Lors de l'utilisation de ces fonctions, veuillez vous référer au schéma suivant pour le câblage :
- Le
MMU tool boardsur le schéma est uniquement fourni à titre de référence pour la définition des interfaces. Lors de l'utilisation réelle, vous devez :
- Connecter directement les câbles aux broches de signal des fin de course de votre carte mère KLIPPER.
- Dans le fichier de configuration (par exemple
printer.cfg), modifier et confirmer les configurations des brochesPD3,PD4etPD5pour garantir un fonctionnement correct.
Configuration de référence
- Configuration de référence utilisant la carte mère
[filament_switch_sensor Material_breakage_detection]
pause_on_runout: true
switch_pin: ^PD3 # Remplacer par la broche utilisée
runout_gcode:
PAUSE
RESPOND MSG="Rupture de filament détectée"
#SET_IDLE_TIMEOUT TIMEOUT=86400
insert_gcode:
RESPOND MSG="Approvisionnement déclenché"
event_delay: 2.0
pause_delay: 2.0
debounce_delay:2.0
[gcode_button Approvisionnement déclenché]
pin:^!PD4 # Remplacer par la broche utilisée, connectée à la broche d'approvisionnement
press_gcode:
RESPOND MSG="Approvisionnement déclenché"
# Gcode personnalisé
[gcode_button Retrait déclenché]
pin:^!PD5 # Remplacer par la broche utilisée, connectée à la broche de retrait
press_gcode:
RESPOND MSG="Retrait déclenché"
# Gcode personnalisé
-
Vous devez mettre à jour le firmware vers la version
V1.1.0. -
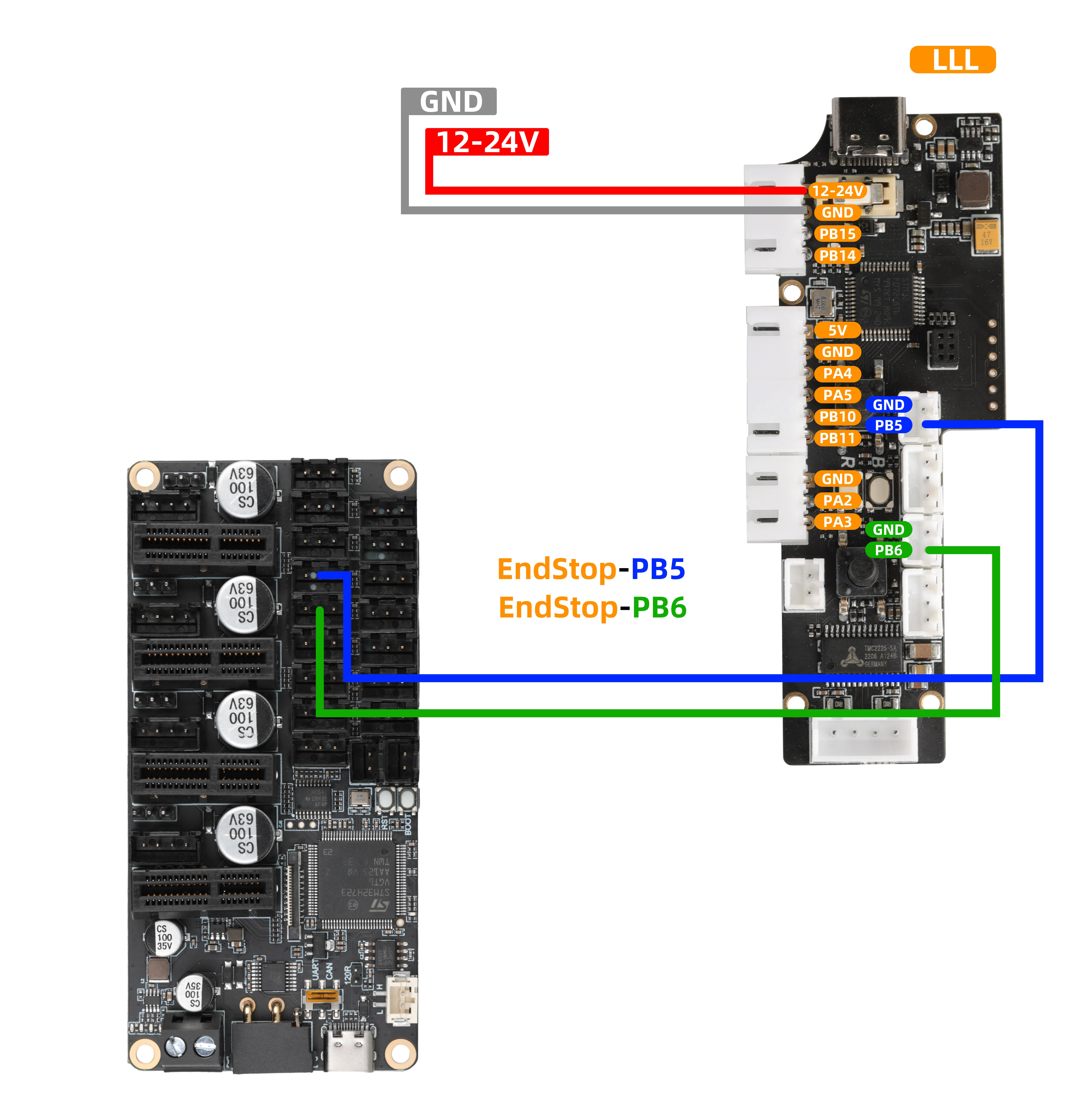
Le buffer peut détecter l'état de niveau bas des broches suivantes pour effectuer un approvisionnement ou un retrait automatique continu :
-
Approvisionnement automatique : Lorsque la broche
PB5détecte un signal bas, le buffer exécute un approvisionnement continu. -
Retrait automatique : Lorsque la broche
PB6détecte un signal bas, le buffer exécute un retrait continu.
Guide de câblage
- Lors de l'utilisation de ces fonctions, veuillez vous référer au schéma suivant pour le câblage :
- Le
MMU tool boardsur le schéma est uniquement fourni à titre de référence pour la définition des interfaces. Lors de l'utilisation réelle, vous devez :
- Connecter directement les câbles aux broches de signal des fin de course de votre carte mère KLIPPER.
- Dans le fichier de configuration (par exemple
printer.cfg), modifier et confirmer les configurations des brochesPB5etPB6pour garantir un fonctionnement correct.
Configuration de référence
- Ajout de la configuration
- Veuillez noter que cette configuration doit être ajoutée après avoir configuré les fonctions de base.
- Configuration de référence utilisant la carte mère
[output_pin _Approvisionnement]
pin:!PD6 # Remplacer par la broche utilisée
debounce_delay:2.0
value:0
[output_pin _Retrait]
pin:!PD7 # Remplacer par la broche utilisée
debounce_delay:2.0
value:0
[gcode_macro Approvisionnement du buffer] ## Approvisionnement du buffer
gcode:
SET_PIN PIN=_Retrait VALUE=0
SET_PIN PIN=_Approvisionnement VALUE=1
G4 P10000 # 10 secondes
SET_PIN PIN=_Approvisionnement VALUE=0
[gcode_macro Retrait du buffer] ## Approvisionnement du buffer
gcode:
SET_PIN PIN=_Approvisionnement VALUE=0
SET_PIN PIN=_Retrait VALUE=1
G4 P10000 # 10 secondes
SET_PIN PIN=_Retrait VALUE=0
Présentation des fonctionnalités
- Associé au capteur de rupture/blocage
FLY-MDM, le buffer peut détecter les blocages de filament. - Vous devez mettre à jour le firmware vers la version
V1.1.0.
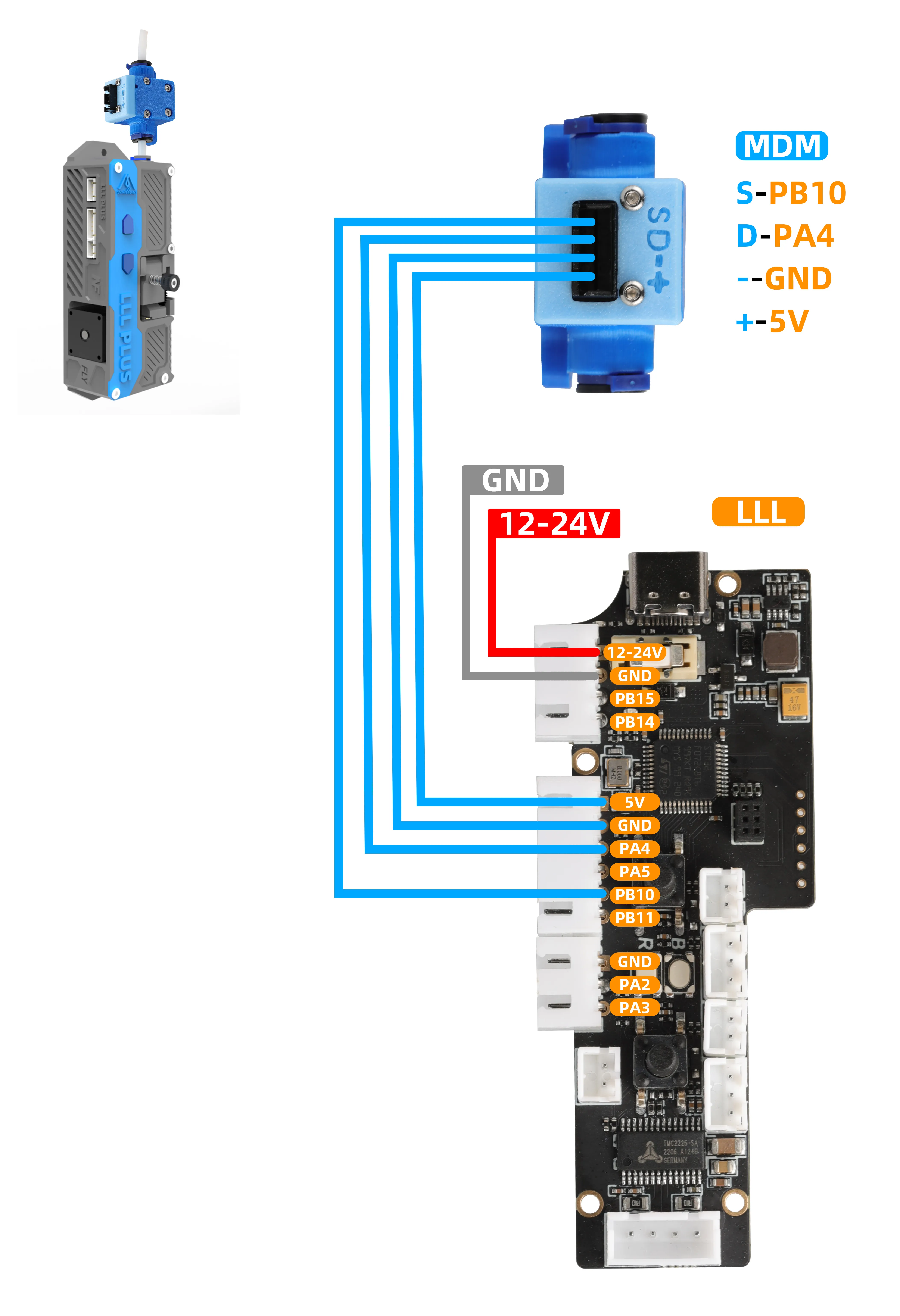
Câblage matériel
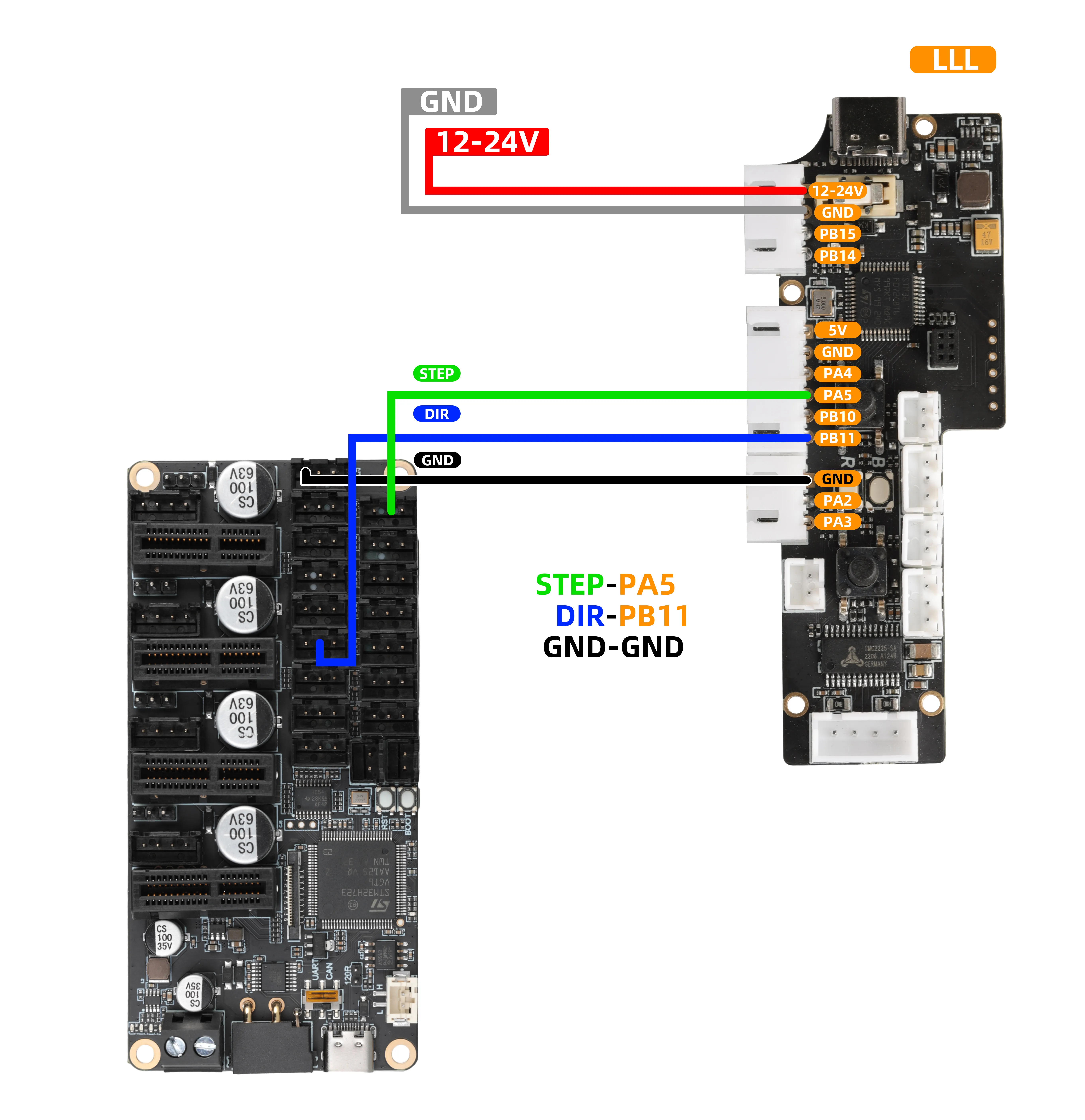
- Le câble de signal du buffer doit être connecté à une broche numérique de sortie générale inutilisée sur la carte mère, par exemple :
- Connecter la broche
STEP(PA5du buffer) à l'une des brochesPWM,RGBou12864de la carte mère. Veuillez noter que la broche du servo de la sonde BL-Touch peut également être utilisée. - Connecter la broche
DIR(PB11du buffer) à la broche de fin de course de la carte mère.
-
Cette connexion permet de surveiller l'état de fonctionnement du moteur de l'extrudeur, ce qui est essentiel pour détecter les blocages.
-
Lors de l'utilisation de ces fonctions, veuillez vous référer au schéma suivant pour le câblage :
- Le
MMU tool boardsur le schéma est uniquement fourni à titre de référence pour la définition des interfaces. Lors de l'utilisation réelle, vous devez :
- Connecter directement les câbles aux broches de signal des fin de course de votre carte mère KLIPPER.
- Dans le fichier de configuration (par exemple
printer.cfg), modifier et confirmer les configurations des brochesPD3etPC0pour garantir un fonctionnement correct.
- Exemple de câblage MDM
Configuration de référence
- Ajout de la configuration
- Veuillez noter que cette configuration doit être ajoutée après avoir configuré les fonctions de base.
- Veuillez noter que dans la configuration ci-dessous, vous devez modifier les numéros des broches
STEPetDIRselon votre câblage. - En outre, les autres paramètres doivent correspondre à la configuration de votre extrudeur, faute de quoi la détection de blocage pourrait échouer.
- Configuration de référence utilisant la carte mère
[extruder_stepper my_extra_stepper]
extruder = extruder
step_pin: PE10
dir_pin: PD4
distance_par_tour: 17.472
rapport_engrenage:50:10
microsteps:16
pas_complets_par_tour: 200
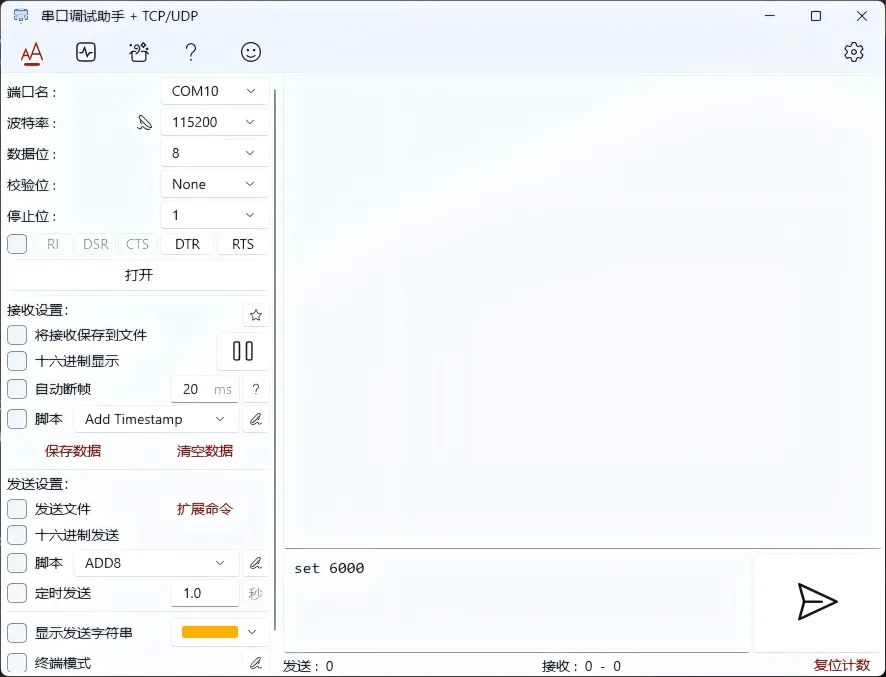
Configuration des paramètres du buffer
Obtenir l'assistant de port série- Connectez le module à l'ordinateur à l'aide d'un câble USB, ouvrez l'assistant de port série, sélectionnez le port correspondant et définissez la vitesse en bauds à 115200, puis cliquez sur Connexion.
- Si votre configuration d'extrudeur ne contient pas de
gear_ratio, veuillez remplacer lenombre de dents de l'engrenage moteuret lenombre de dents de l'engrenage entraînépar1.
Description des paramètres
| Fonction | Commande de configuration (à saisir dans l'outil série) | Valeur par défaut | Unité | Remarque |
|---|---|---|---|---|
| Afficher tous les paramètres actuels | Loading... | - | - | Envoyer cette commande pour lire toutes les configurations actuelles. |
| Configurer le nombre d'impulsions du moteur | Loading... | 916 | - | Définir le nombre d'impulsions nécessaires pour un déplacement de 1 mm du moteur. |
| Configurer la distance de détection de l'encodeur | Loading... | 1,73 | mm | Définir la distance parcourue par le matériau consommable représentée par chaque signal de l'encodeur. |
| Configurer le délai d'expiration | Loading... | 60000 | ms | Définir le temps d'arrêt automatique en état d'inactivité afin d'éviter l'extrusion continue. |
| Configurer le coefficient d'échelle d'erreur | Loading... | 2,0 | - | Erreur autorisée = valeur encoder X valeur scale.Exemple : 1,73 * 2,0 = 3,46 mm |
| Configurer la commande de vitesse | Loading... | 260 | mm | Définir la vitesse de fonctionnement du tampon, maximum 600 (tours/minute), le firmware doit être mis à jour vers la version V1.1.1. |
Instructions importantes :
- Format de la commande : dans la colonne « Commande de configuration » du tableau ci-dessus, la commande complète (par exemple
steps 916) doit être saisie intégralement. - Méthode d'envoi : saisir la commande dans la zone d'envoi de l'assistant série, puis cliquer sur le bouton Envoyer.
- Enregistrement automatique : une fois la commande envoyée avec succès, les paramètres prennent immédiatement effet et sont automatiquement enregistrés, aucune action supplémentaire n'est nécessaire pour sauvegarder.
- Vérification des paramètres : après la modification de n'importe quel paramètre, envoyer la commande
infopour consulter tous les paramètres actuels et vérifier que la configuration est correcte.